 目前全膝關節置換骨科手術之進行,以採用專用製具,醫生根據經驗以手動之方式進行,在步驟繁多的手術過程中,需不斷的更換及定位製具,以完成手術過程中的所需特定角度的對位。為了簡化這些手術繁雜的步驟,及提高手術過程中切割的精準度,於是創作此輔助型手術機器人,以期在手術施行的過程中,有效增加手術的精度,減輕醫生的負擔、縮短手術的時程。
目前全膝關節置換骨科手術之進行,以採用專用製具,醫生根據經驗以手動之方式進行,在步驟繁多的手術過程中,需不斷的更換及定位製具,以完成手術過程中的所需特定角度的對位。為了簡化這些手術繁雜的步驟,及提高手術過程中切割的精準度,於是創作此輔助型手術機器人,以期在手術施行的過程中,有效增加手術的精度,減輕醫生的負擔、縮短手術的時程。
|
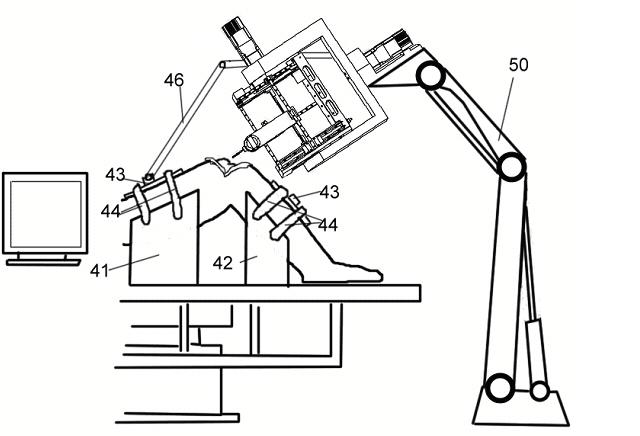
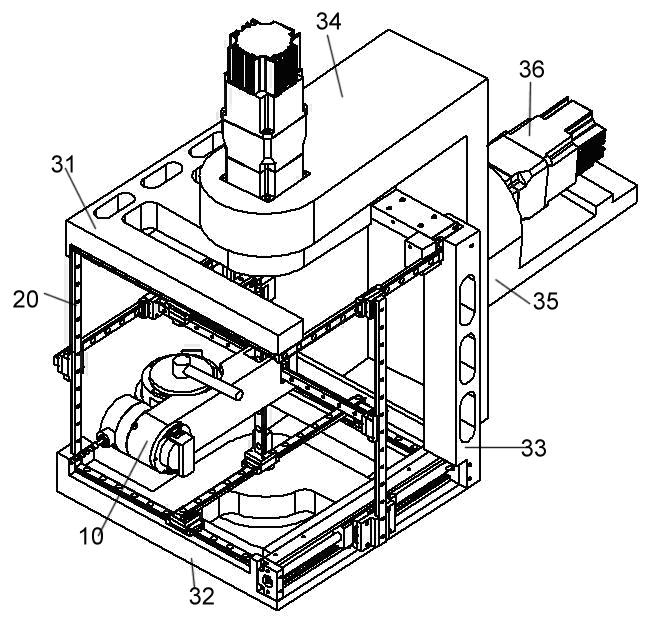
本創作建構一個具有高剛性、承受高切削負載,同時擁有各軸解耦特性,易於進行特定方位與路徑控制等優點的輔助手術機器人,,利用一種結合並聯式與串聯式的混合式解耦型並聯機構作為機器人的本體,此機器人本體係由三個獨立旋轉進給軸與一解耦型並聯機構所組成,其中一主旋轉軸架設於並聯機構內部之刀具平台上,可透過馬達自動調整切割角度,另外兩旋轉軸以串接之方式架設於並聯機構之外部,作為骨頭對位的方位調整。而解耦型並聯機構由三組線性驅動元帶動,可驅動刀具平台進行空間上X-Y-Z三維的平移方向之運動,進行膝蓋骨的切除。搭配電腦軟體設定的切除邊界,由控制界面卡與致動器等控制模組,使並聯機構沿著切削路徑進行骨頭切除。此混合式機構可克服以往用於骨科手術上串聯式機器人所造成的較大定位誤差、慣性累加作用及體積龐大之缺點,並具有在機構運動之解耦控制簡易優點、進行骨頭切除動作時,單一時間為單一馬達作動,因此提高了操作安全性等優點。而針對膝關節手術過程而言,在執行過程前會(利用骨釘與器具等)將此機構與骨頭剛性連結,或安裝骨頭移動裝置,使之手術過程中即使骨頭有位移情形下,仍不影響切除動作。手術進行骨頭之前,手術機器人是以量測模式,藉由刀具端點觸碰骨頭上之特徵點,傳至PC電腦決定人工膝關尺寸與骨頭切除規劃。透過骨頭切除規劃,產生3D的切割邊界,此時手術機器人由量測模式轉成切除模式,醫師即在手術機器人的協助之下,沿著軟體設定邊界進行骨頭切除,系統亦允許對切除邊界作手動調整,協助進行軟組織的平衡調整。
混合式解耦型並聯機構之骨科手術輔助機器人,主要分成兩大部分:一為骨頭切除系統,一為架設固定系統。骨頭切除系統為機構本體,而此機構以創新的解耦型並聯機構為基礎,並在內部裝設一獨立刀具平台且於外部架設二獨立旋轉軸,使機構能擁有六個自由度的運作,以達成骨科手術中工作空間與方位的要求。此機構構造元件主要包括:一解耦型並聯機構,二獨立旋轉軸、一切削模組、及控制器(如圖一所示)。第一旋轉軸,係指刀具平台和刀具座相組裝,使其兩者之間有一維自由度旋轉運動,並在刀具平台上裝置力量感測器與握把(如圖三所示)。其餘兩旋轉軸則以串連的方式連接於並聯機構外部上,並將一旋轉軸固,使整個並聯機構有二維自由度的旋轉運動。
|